Sight Not Seen - Part II
by Exodus_AU
Posted on 2019-09-13

Thanks for tuning in for part II of ‘Sight Not Seen’; if your just starting out, jump on over to part I.
OK, so we were full swing into the project… All hands on deck… except. Where to start?!
So I ordered a bunch of different sensors, microcontrollers, vibration motors and wires.
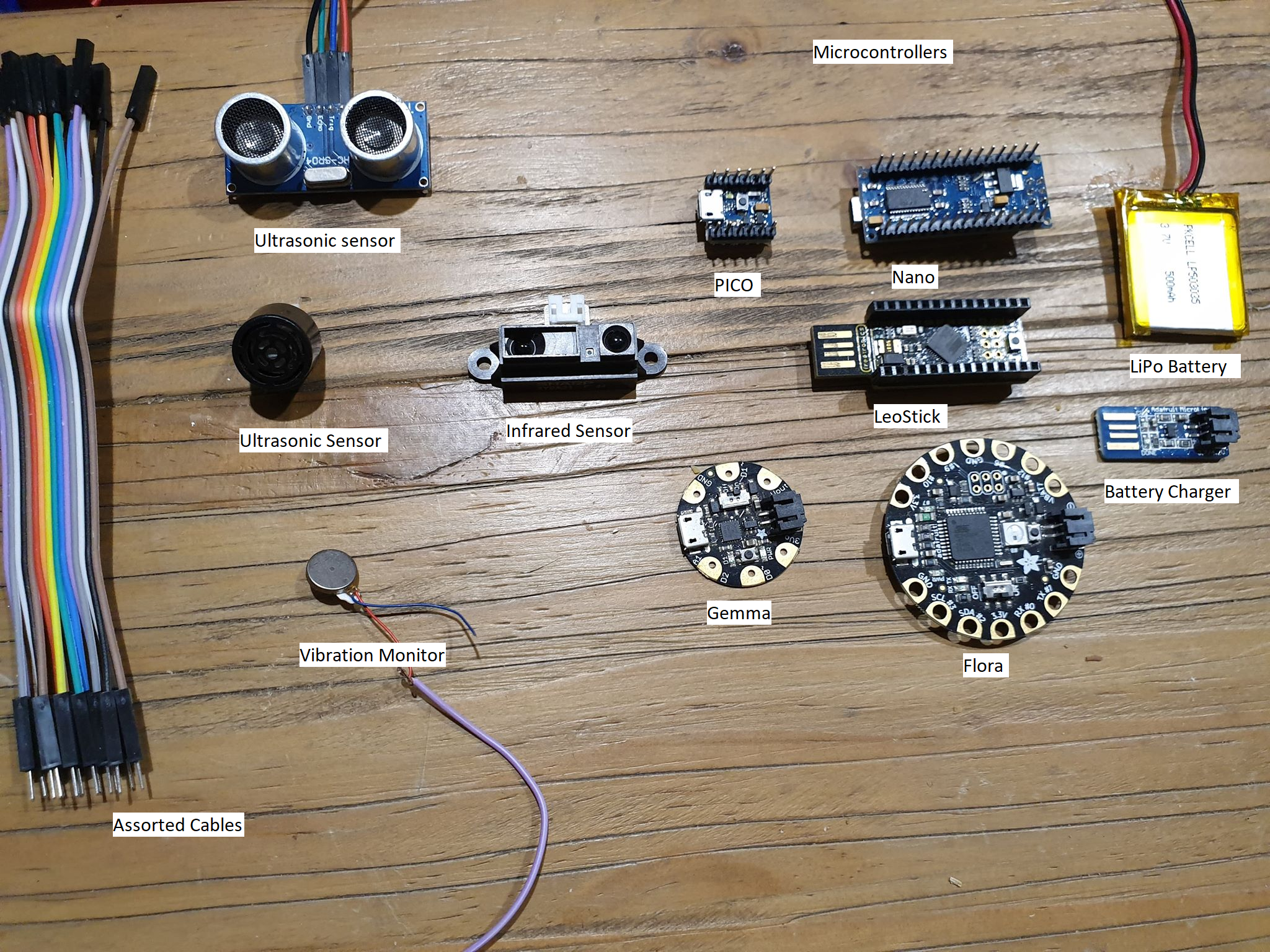
The first 2 sensors were Infrared and Ultrasonic.
As to not bore you, here's a quick run down.
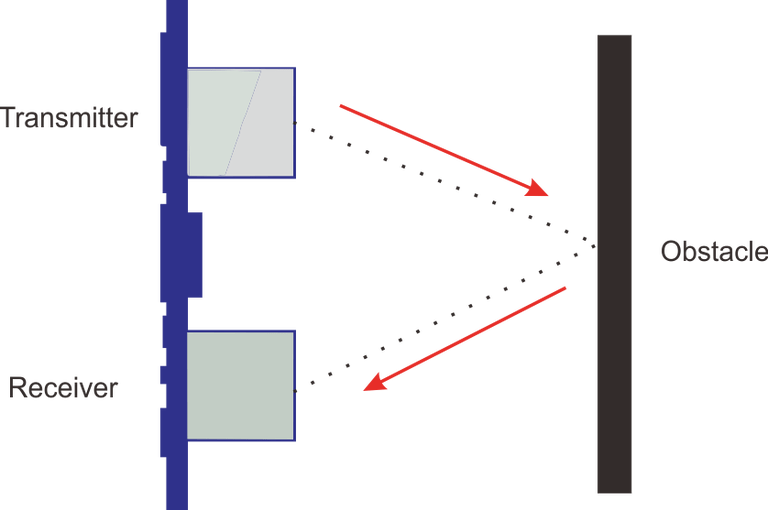
Infrared works by sending a light (that is not visible to the human eye) and detecting the return of the same IR light’s strength to determine the distance of an obstacle.
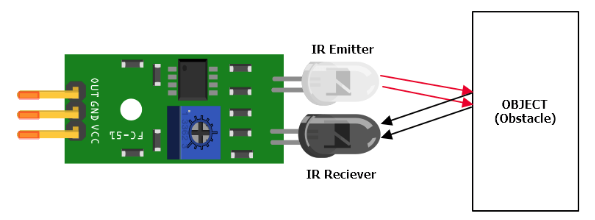
There are a few problems with IR sensors. Black surfaces absorb light and will not reflect accurately as well as the fact they are inaccurate under direct sunlight.
The Ultrasonic sensor works by emitting a sound (unable to be heard from a human). They then wait for the sound to be reflected back to calculate the distance of the obstacle.
The biggest issue with Ultrasonic is the inaccuracy when detecting soft objects (like curtains), small objects and a problem called ghosting where an obstacle such as glass may reflect the signal and cause a false positive.
With direct sunlight being a problem with Infrared, we decided to use the Ultrasonic sensor for the first prototype.
To kick off the prototype we started simple, just to get the sensor working without the vibrations or anything. As the Leostick had on-board sound we would use this to simulate the vibration motor for now.
The first sensor had a maximum distance of 20cm, once the sensor detects an obstacle at 15cm it would set off the beep sound as a notification.


Stay tuned for part III as we continue on with the design.
Signing out,
Exodus_AU
Powered by Froala Editor